
Table of Contents
- Autonomous mining and advanced connectivity
- Remote operation in autonomous extraction
- Industrial 5G networks for autonomous mining
- Verifiable mining automation
- Autonomous mining reference sites
- Mining efficiency and operational continuity
- Roadmap for implementing autonomy
- Conclusions
- References
- Frequently Asked Questions (FAQs)
In autonomous mining, advanced connectivity no longer functions only as digital support; it has become a critical infrastructure for operational safety, remote control, and production continuity. If the network loses stability, autonomous operations also lose responsiveness, visibility, and coordination, becoming exposed to stoppages, blind zones, and delayed decisions.
Remote extraction requires controlled latency, robust coverage, reliable data, and systems capable of reacting before a deviation reaches the equipment, the operator, or the mining plan. In this context, modern autonomy is designed as an integrated ecosystem: private networks, sensors, fleet control, OT cybersecurity, predictive maintenance, and a remote decision-making center.
Autonomous mining and advanced connectivity
Autonomous mining integrates mobile equipment, artificial perception, traffic control, dispatch platforms, geotechnical monitoring, telemetry, analytics, and remote operation centers. It includes driverless trucks, autonomous drills, assisted shovels, teleoperated dozers, inspection robots, drones, automated trains, on-demand ventilation, and digital twins.
The most important technical shift is that the mine stops operating through isolated equipment and begins operating through connected domains. An autonomous truck requires digital routes, geofences, loading points, exclusion zones, priority rules, onboard sensors, stable network connectivity, safe-stop logic, and human supervision from a remote center.
The most direct regulatory reference is ISO 17757:2019, which establishes safety requirements for autonomous and semi-autonomous machines used in mining and earthmoving operations. The standard covers machines, associated systems, infrastructure, hardware, and software throughout the lifecycle, confirming that autonomy must be managed as an integrated system of safety, control, and operation.
Digital architecture of an autonomous mine
A solid architecture starts with a key question: what decisions will the system make, and which will be escalated to the operator? From there, levels of autonomy, operational zones, authorized routes, degraded modes, interaction rules with manned equipment, and safe shutdown criteria are defined.
The technological core combines Autonomous Haulage Systems (AHS), Fleet Management Systems (FMS), GNSS/INS, radar, LiDAR, cameras, artificial perception, edge computing, V2X communications, traffic control, and visualization platforms. This architecture transforms the mine into an operational network where every data point impacts safety, productivity, and maintenance.
Advanced connectivity sustains this type of architecture. A partial communication loss in conventional operations causes delays; in autonomous operations it stops routes, degrades video, triggers interlocks, or reduces productivity for an entire shift. Therefore, the network must be specified with latency, availability, handover, coverage, redundancy, uplink capacity, OT/IT segmentation, interference monitoring, and fault recovery.
Remote operation in autonomous extraction
Remote operation changes the role of workers. The operator leaves the cabin and shifts to supervising exceptions, authorizing maneuvers, interpreting alarms, validating operational states, and coordinating production with maintenance, geology, ventilation, safety, and plant operations.
ABB describes integrated remote operation centers as spaces capable of monitoring and controlling equipment across multiple mines, mills, smelters, and power plants, analyzing large volumes of variables from locations kilometers away.
A representative case is observed in underground operations with autonomous trucks supervised from control rooms or integrated centers far from the working face. In this environment, vehicles recognize routes, detect changes, execute loading and unloading missions, and stop when unauthorized entry occurs in confined zones. This type of remote extraction reduces human exposure without losing operational traceability.
A representative case is observed in underground operations with autonomous trucks supervised from control rooms or integrated centers far from the active face. In this environment, vehicles execute programmed routes supported by sensors, positioning systems, and control algorithms, detecting environmental variations, coordinating automated loading and unloading cycles, and activating stop protocols when unauthorized entry occurs in confined zones. This model of remote extraction reduces human exposure without compromising traceability or operational continuity.
Safety barriers and monitoring
Remote extraction reduces human presence in areas with rockfalls, blind spots, heavy equipment interaction, dust, gases, vibration, post-blast zones, and operational fatigue. Safety depends on physical, digital, and procedural barriers.
These include gates, laser sensors, geofences, exclusion zones, access control, cameras, collision avoidance systems, entry protocols, work permits, operational lockout, prioritized alarms, and automatic shutdown systems. The autonomous mine must know when to proceed, when to stop, and when to request human intervention.
Real-time monitoring also improves incident investigation. Every braking event, signal loss, route deviation, alarm, state change, and authorization is recorded. This traceability helps correct routes, optimize maintenance, improve training, and reduce variability between shifts.
Industrial 5G networks for autonomous mining
Industrial 5G networks are gaining ground because they deliver mobility, low latency, bandwidth, traffic prioritization, and stable coverage for moving equipment. In autonomous mines, the network must support HD video, telemetry, remote control, IoT sensors, localization, slope monitoring, and data transfer to analytics platforms.
Ericsson reports that private 5G in remote mining improves range compared to Wi-Fi, provides uplink capacity for multiple video streams, achieves latency below 50 ms between joystick input and machine response, and reduces dead zones that cause safety shutdowns.
From industrial wi-Fi to private 5G
The transition to private 5G does not require eliminating existing technologies. Many operations combine fiber backbones, private LTE for wide coverage, industrial Wi-Fi in workshops, operational radio for voice, and satellite links as backup.
The difference lies in operational requirements. An environmental sensor tolerates seconds of delay; a remote maneuver requires near-instant response. A surveillance camera uses moderate bandwidth; a teleoperation console requires multiple stable HD streams. Therefore, the network must be designed from the risk matrix and production function perspective.
Advanced connectivity also requires OT cybersecurity. In an autonomous mine, weak remote access, poor segmentation, or unvalidated updates can impact both production and safety. The network requires identity management, zones and conduits, anomaly monitoring, supplier control, backups, recovery testing, and formal change management.
Verifiable mining automation
Mature mining automation is based on identified risks, verified controls, and measured performance. Autonomy must go through hazard analysis, functional requirements, integration testing, real-world validation, simulation, pilot operation, training, and continuous review.
In 2026, Komatsu reported the deployment of its 1,000th ultra-class autonomous haul truck with FrontRunner AHS, a system that has moved more than 11.5 billion metric tons since its commercial introduction.

Its MineStar Command system has reported billions of tons hauled autonomously without injuries associated with those trucks, along with improvements in consistency, fuel efficiency, and route discipline.
Validation, scenarios, and control handover
One of the most demanding challenges in autonomous mining is validating system behavior under dust, rain, low visibility, interference, changing routes, interaction with manned equipment, unexpected obstacles, and degraded communications.
An algorithm is not validated by working in ideal conditions. It must demonstrate safe behavior within its operational domain: what it detects, what it ignores, when it stops, when it escalates to the operator, and how it records decisions.
Human intervention also requires design. The operator needs sufficient information, clear alarms, reliable video, event prioritization, and realistic response time. The future will be supervised autonomy supported by highly trained professionals and smarter systems.
Autonomous mining reference sites
The modern history of autonomous mines began with progressive deployments. The first commercial AHS deployment is widely associated with Gabriela Mistral (Codelco, Chile), where Komatsu implemented FrontRunner in 2008.
In Chile, Escondida Norte represents a larger scale operation. In 2026, BHP reported 33 autonomous trucks and 11 autonomous drills, producing 30% of Escondida’s output and moving more than 350,000 tons per day.
In the United States, Bagdad Mine (Freeport-McMoRan, Arizona) stands out for copper mining progress. In 2025, the fleet of autonomous trucks was fully implemented as part of a workforce transition without layoffs.
In Mexico, Buenavista del Cobre (Cananea, Sonora) is a strategic open-pit mine. It should not be presented as fully autonomous based on public information, but rather as a key operation for advanced connectivity, real-time monitoring, fleet optimization, and mining automation.
Regarding the most technologically advanced mine, there is no universal ranking. Based on public data, Rio Tinto’s Gudai-Darri is among the leading examples, integrating autonomous trucks, autonomous drilling, AutoHaul, robotic labs, autonomous water carts, and remote monitoring from Perth (1,500 km away).
As a visual complement, the following video shows the progress of autonomous trucks in mining operations, confirming how mining automation is moving from controlled pilots to large-scale operational fleets. Video courtesy of: BBC News.
Mining efficiency and operational continuity
Mining efficiency in autonomous operations is measured by cost per ton, plan compliance, asset utilization, energy consumption, tire life, mechanical availability, cycle variability, safety events, network stability, and data quality.
Komatsu describes AHS as a tool to harmonize speed, reduce idle time, stabilize cycles, and reduce emissions per ton.
Electrification, AI, and the future mine
The next frontier is the convergence of autonomy, electrification, and artificial intelligence. Electric haul trucks, trolley assist, load management, intelligent ventilation, autonomous dispatch, and predictive maintenance will require real-time coordination.
ABB links mining automation with process control, demand-based ventilation, remote operations, asset monitoring, electrification, and robotics to remove personnel from hazardous zones and increase productivity.
Autonomy generates value when it reduces variability. Autonomous trucks maintain distances, respect speed limits, follow authorized routes, and produce comparable data across shifts.
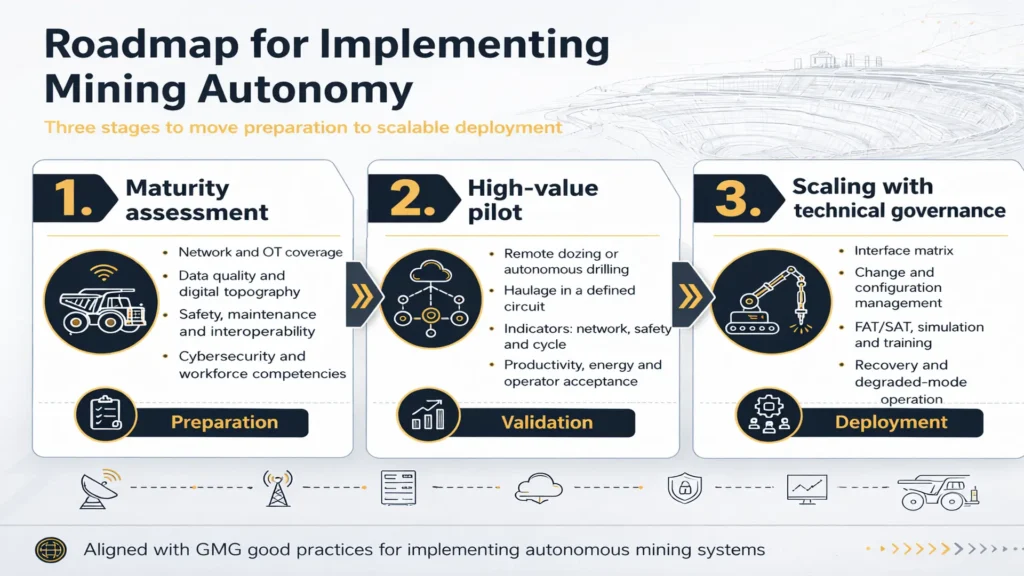
Roadmap for implementing autonomy
The first step is a maturity assessment: network coverage, data quality, digital terrain models, operational discipline, safety culture, maintenance readiness, interoperability, fleet management, cybersecurity, and workforce skills.
The second step is selecting a high-value, low-risk use case: remote dozing, autonomous drilling, controlled haulage circuits, drone monitoring, or robotic inspection.
The third step is scaling with technical governance: interface matrices, change control, software versioning, FAT/SAT testing, simulation, training, vendor control, recovery procedures, and degraded mode criteria.
Conclusions
Autonomous mining is consolidating as a high-precision engineering discipline focused on safety, productivity, and operational continuity. Its success depends not on isolated technologies, but on the convergence of advanced infrastructures: industrial 5G networks, robust architectures, OT cybersecurity, and reliable data systems.
The future of mining depends on the symbiotic interaction between highly skilled professionals managing complex systems and enabling technologies such as high-fidelity sensors and traceable processes. Technology optimizes execution, but human expertise remains central to supervision and strategy. Rather than replacing human judgment, autonomy amplifies it by shifting strategic decisions to remote operation centers.
References
- ISO. (2019). ISO 17757: Earth-moving machinery and mining , Autonomous and semi-autonomous machine system safety. International Organization for Standardization.
- Ericsson. (2022–2024). Private 5G in mining: enabling connected operations and remote control. Ericsson Industry Reports.
- ABB. (2023). Remote operations and integrated control centers in mining and process industries. ABB Corporate Publications.
- Caterpillar. (2024–2025). MineStar Command for Hauling: autonomous mining systems performance overview. Caterpillar Technical Reports.
Frequently Asked Questions (FAQs)
What does connectivity require in autonomous mining?
It requires continuous coverage, low latency, high uplink capacity, redundancy, OT cybersecurity, performance monitoring, and the ability to support video, telemetry, sensors, remote control, and AHS/FMS systems without compromising safety.
How does remote mining operation work?
It operates through instrumented equipment, cameras, sensors, private networks, control platforms, and a ROC where operators supervise, authorize actions, intervene, and coordinate production from a safe environment.
What networks are used in autonomous mining?
Private 5G, industrial LTE, fiber optics, specialized Wi-Fi, operational radio, and satellite backup. Industrial 5G stands out for mobility, low latency, and high-bandwidth remote control.
What risks does real-time monitoring reduce?
It reduces exposure to moving equipment, unstable slopes, gas, dust, fatigue, collisions, post-blast zones, and early equipment failures while improving traceability of events and decisions.
What technologies drive autonomous mining?
AHS, FMS, AI, machine learning, GNSS/INS, LiDAR, radar, cameras, edge computing, digital twins, drones, robotics, IoT sensors, OT cybersecurity, private networks, and predictive analytics.
