
Inspenet, October 10, 2023.
A group of researchers, led by associate professor of mechanical engineering Aaron Johnson, used a four-legged robot to develop a movement tactic based on immediate responses. Other options, such as those with wheels, can become immobilized by vines or cause damage to the natural environment.
” When you take robots outdoors, the whole problem of interacting with the environment becomes exponentially more difficult because you have to be more deliberate in everything you do ,” said David Ologan, a master’s student in mechanical engineering.
For his part, Justin Yim, an engineering professor at the University of Illinois Urbana-Champaign and a collaborator on the project, said: ” Real-world obstacles can be rigid as a rock or soft as a vine, and we want machines to have strategies that avoid bump into either one .”
Motion-focused improvements
The research demonstrates a momentum-based observer for joint proprioceptive torque estimation suitable for classifying contacts on a robot limb as entanglements. That is, it monitors the mobility of its legs to see if any of them get stuck in something and do not move forward .
” Robots with legs can select footholds and step over things instead of just stepping over everything ,” Ologan said. “The problem with this is that with each step you have to reason about your support points. The system is incredibly delicate. If you run into a step, the whole machine may fall, so we need methods to respond to external contact“.
Ologan explains that the environment also affects your efficiency and performance. ” It’s interesting to see the potential for legged robots in vegetation-based outdoor environments ,” he said.
The ability of quadrupeds to move through vegetation has a wide range of applications in various fields, Ologan mentioned. Currently, these are used in the inspection of oil platforms and improving their capabilities can be beneficial even in rescue operations.
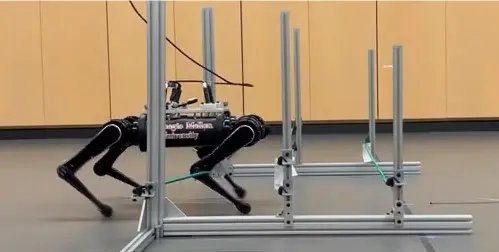
Likewise, the team conducted tests with various variants of the robot Charlie’s walking pattern and concluded that the most effective option to allow it to navigate and free itself from obstacles was to have it retract its legs reactively . In contrast, other approaches, such as high steps and forward knees, did not prove to be as effective.
Through this evaluation, the team was able to develop a simple reaction movement of the leg that allowed it to free itself from any detected entanglement . This technology to assist robots in untangling can also be incorporated into other machines without the need to modify their existing hardware.
” This whole reaction strategy is just one part of a multi-step process ,” Ologan stressed.
Don’t miss our daily news and be part of our community on social networks!
Inspenet: https://inspenet.com/
YouTube: https://www.youtube.com/@inspenet
LinkedIn: https://www.linkedin.com/company/inspenetnetwork
Facebook: https://www.facebook.com/inspenetnetwork
Instagram: https://www.instagram.com/inspenet/
Source: https://techxplore.com/news/2023-10-tricky-tangles-robots-vine-like-vegetation.html