A team from The Technical University of Munich (TUM) has taken a significant leap forward in the fight against marine pollution with the development of an autonomous underwater robot designed to efficiently identify and collect debris from the seabed.
The underwater robot is part of an interconnected system that includes a support vessel, an autonomous auxiliary boat, an aerial drone and a small underwater exploration robot. The array operates synchronously, mapping the seafloor using ultrasound and cameras, and then guiding the main robot to hotspots of trash accumulation.

How does the underwater robot work?
TUM’s diving robot, powered by eight mini-turbines, is capable of accurate maneuvering thanks to its buoyancy-neutral design, allowing it to operate with precision even in waters with limited visibility. Using a combination of sonar and cameras, the system generates 3D models of submerged objects, facilitating their identification and safe recovery.
It is worth noting that the lack of visual databases to train AI vision systems has been a challenge, therefore, the project partners have labeled more than 7000 images to train the neural network in charge of distinguishing between debris and the natural marine environment.
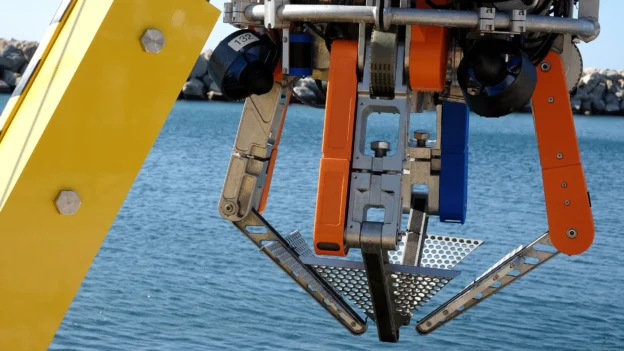
The robot has a four-fingered robotic gripper capable of exerting up to 4000 newtons of force, allowing it to lift objects weighing up to 250 kg. At the same time, it has sensors that calibrate the pressure in real time, to avoid damaging fragile materials such as glass bottles or plastic buckets.
Wired connectivity for power and control
Although the system is designed to operate autonomously, the robot is kept connected by a cable to the support vessel to ensure a constant power supply and enable better data processing, especially in tasks requiring higher computational accuracy. In addition, the cable acts as a means of extraction for heavy objects to the surface.
The robotic claw can be seen lifting a vehicle seat during its testing at the port of Marseille. Source: MIRMI – Robotics and Machine Intelligence.
First successful tests in the port of Marseille
The system was tested in the port of Marseille, where it proved capable of recovering bulky items such as bicycles, tires and fishing nets. In locations such as Dubrovnik, teams recorded more than a thousand pieces of trash in relatively small areas, underlining the urgency of large-scale technological solutions.
Moreover, according to TUM’s analysis, the system is economical at depths greater than 16 meters, where human diving becomes a dangerous and expensive task. This autonomous underwater robot is part of the European SEACLEAR project, a European Union-funded initiative to automate the underwater cleaning of marine ecosystems, and is further proof that autonomous technology is a viable and promising solution for cleaning the oceans.
Source and Photos: Technical University of Munich