
Table of Contents
Inspenet, December 11, 2023.
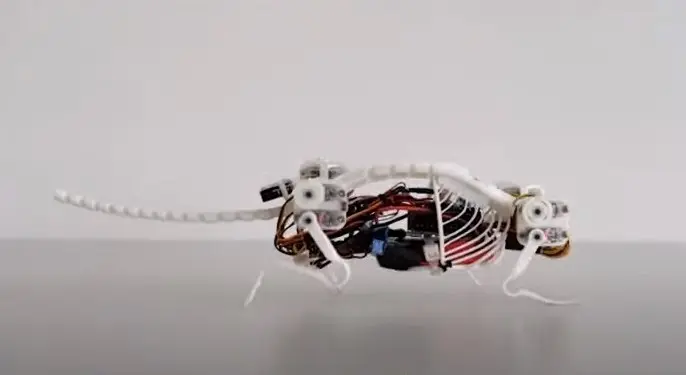
A group of researchers from Germany and China have created a neurorobotic robot mouse with a flexible spine that can perform lateral bends, demonstrating greater agility compared to other quadruped robots available.
The study on this robot, called NeRmo, with a length of 40 centimeters, was published in the journal Science Robotics last Thursday. Scientists from the Technical University of Munich and Sun Yat-sen University designed this robot inspired by a mouse, with artificial nylon tendons that enable flexible and smooth movement, thus imitating the spinal column.
NeRmo: the flexible robot mouse
Likewise, the researchers built a sturdy front structure to house NeRmo’s electronics, along with a spinal column in the back that has four lumbar and lateral joints. The knee and elbow joints are equipped with artificial tendons that allow the robot to emulate the fast and agile movements of a mouse, as detailed in the study.
It weighs 225 grams and has 13 degrees of freedom, enabling a wide variety of flexible movements, such as rotation of the hips and shoulders, flexion of the knees and elbows, lateral and sagittal flexion of the spine, horizontal rotation and pitching of the head, as well as lateral curvature of the tail. This design significantly improved the robot’s turning ability, reducing the time it took to exit a maze in a navigation task by more than 30%, compared to when the spine controller was inactive.
“The flexible spine improves the locomotion performance of quadrupeds in static stability, walking speed and turning behavior. Our study may help better understand the spinal-based locomotion abilities of quadrupeds and highlight promising design concepts for developing robots with more agile legs.“says Bing Zhenshan, corresponding author of the study.
Don’t miss any of our posts and follow us on social media!
Inspenet.com YouTube LinkedIn Facebook Instagram
Source: chinadaily.com.cn
Photo: science.org