

Inspenet, September 6, 2023.
A group of engineers at the University of California at San Diego (USA) have developed a robotic hand capable of turning objects using only the sense of touch, without relying on vision . The scientists behind this project were inspired by the natural way humans manipulate objects without needing to see them, a concept easy to understand but difficult to implement in automated systems.
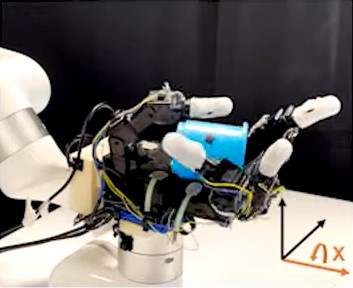
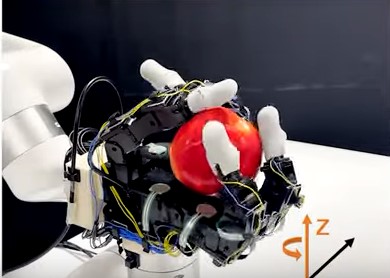
The robotic limb designed by these scientists can perform smooth turns on a wide variety of objects, from small toys to fruits, vegetables and cans, without damaging or crushing them. The only type of information that this device uses comes from the sense of touch . Thus, the researchers are confident that this innovation could allow these robots to operate in environments without light.
A robotic hand “nothing expensive”
The engineering team presented their research at the 2023 Robotics: Science and Systems Conference. They used a total of 16 touch sensors, located in the palm and on each of the robot’s four fingers. The main function of most of these sensors is to detect if there is contact between the robot and the object that it is trying to manipulate. These use simple binary signals, making them an inexpensive option .
This approach is complemented by other methods that use fewer sensors, but with higher resolution, making them more expensive. Dr. Xiaolong Wang, a professor of electrical and computer engineering in San Diego, describes the solution as “very simple.” “We have shown that we don’t need details about the texture of something to perform this task.”
The arrangement of tactile sensors allows the robot to identify the three-dimensional structure of the object and its orientation, allowing it to rotate them without relying on vision. To develop this system, a thorough analysis of the joints of the human hands was carried out and the robot accurately and carefully replicates these anatomical details.
During the experiments, the robot was required to hold various objects, including a tomato, a bell pepper, a jar of peanut butter, and even a rubber duck. The latter represented a particularly significant challenge, as recognized by test participants. The next objective is to make the machine able to throw and catch objects or perform juggling with them.
Source: https://www.lavanguardia.com/tecnologia/20230905/9204815/mano-robotica-robot-con-tacto.amp.html