Researchers at the University of Bristol have developed a snail-like robot that mimics the animal’s movements , with an impressive ability to climb surfaces, such as glass and wood, at different angles.
Snail Robot Applications
The Bristol Robotics Laboratory team has equipped the robot with a “sliding suction” mechanism, a system that allows the robot to move on water, functioning as an adhesive and substitute for snail slime.
The study presents a method that makes it easier for robots to climb walls and other hard-to-access surfaces . This advance would improve aspects such as the autonomous inspection of structures : To verify structures such as wind turbine blades, ship hulls, airplanes and the windows of skyscrapers.
Furthermore, the features of the sliding suction mechanism have great potential in various robotic applications, including industrial grasping, climbing, outdoor operation, and material transportation.
How does the snail type robot work?
The ability of snails to glide efficiently, with a single suction cup, inspired the development of this robot. Possessing essential mucus secretion, it reduces friction and improves suction, a principle that was replicated in the robot.
Tianqi Yue, the lead author of the study, highlighted that snails maintain stable sliding, even with a heavy load, such as their shell. That was the model that the researchers followed to develop the “sliding suction”, achieving a result comparable to the snail.
Since mucus is essential in the suction system, the team used water as a cheap and efficient substitute, allowing the robot to navigate successfully while maintaining effective suction.
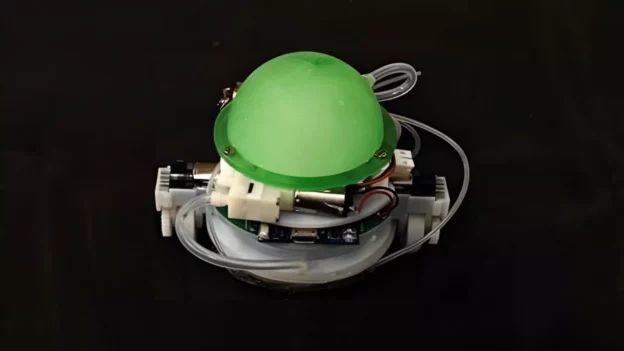
The characteristics and capabilities of Tianqi Yue’s robot
Researchers at the University of Bristol optimized the materials of the suction cup and designed an advanced mechatronic system, with the capacity to transport a mass of 200 grams and avoid obstacles, in addition to carrying up to 1 kg, ten times its own weight.

The route of the Tianqi robot and its capabilities. Source: Tianqi Yue.
The sliding suction mechanism enables the robot to move vertically and upside down with high speed and no power consumption during static adhesion. Tianqi added that the robot’s performance demonstrated low power consumption, high efficiency in adhesion and loading capacity, and simplicity in design, leaving only a trace of water that evaporates quickly.
Follow us on social networks and don’t miss any of our publications!
Inspenet.com YouTube LinkedIn Facebook Instagram X
Source: University of Bristol
Photo: Tianqi Yue