
Científicos de la Universidad Nacional de Seúl se unieron para desarrollar una mano robótica funcional utilizando una impresora 3D. La prótesis, conocida como mano ST3P y que apenas pesa 255 gramos, fue diseñada con la premisa de ser liviana y económica, con un costo estimado de $500, según un reciente artículo publicado por el equipo de investigación.
ST3P: la mano robótica liviana y funcional
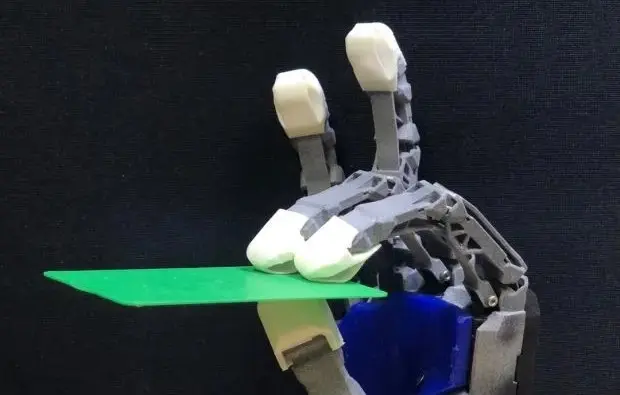
Con nueve articulaciones en los dedos, esta prótesis se fabricó mediante un proceso de impresión 3D de un solo paso, lo que permite un montaje asombrosamente rápido de menos de 10 minutos, en comparación con otras prótesis impresas en 3D.
Además de su eficiencia en el ensamblaje, la mano ST3P demuestra ser completamente funcional, capaz de realizar tareas básicas con una fuerza de tracción de 48 N y una fuerza de agarre de 20 N. Los investigadores, al hablar sobre este innovador producto, expresan tener altas expectativas en cuanto a su creación y sus posibles aplicaciones.
«La sencilla fabricación de la mano ST3P podría ayudarnos a dar un paso más hacia la realización de prótesis de manos robóticas totalmente personalizadas a bajo coste y esfuerzo«, afirma. ellos explicaron.
El grupo de investigación optó por la impresión 3D de un solo paso debido a su capacidad para generar diseños complejos sin necesidad de realizar un ensamblaje posterior. La utilización de esta tecnología de impresión ha simplificado la creación de mecanismos móviles listos para su uso inmediato.
A pesar de los desafíos encontrados en términos de límites de precisión al emplear la impresión 3D, así como la incapacidad para producir una superficie móvil estrechamente acoplada, el equipo ha abordado estos problemas diseñando articulaciones que presentan un espacio entre las partes. Esta estrategia contribuye a permitir que la mano realice movimientos independientes, superando las limitaciones mencionadas anteriormente.
«Simulamos la estructura anatómica de la articulación del dedo humano e implementamos un efecto de leva que cambia la distancia entre las superficies de contacto mediante la flexión elástica de los ligamentos a medida que la articulación se flexiona«, explicaron.
¡No te pierdas ninguna de nuestras publicaciones y síguenos en las redes sociales!
Inspenet.com YouTube LinkedIn Facebook Instagram
Fuente: the-sun.com