Tabla de Contenidos
Inspenet, 10 de octubre 2023.
Un grupo de investigadores, liderado por el profesor asociado de ingeniería mecánica, Aaron Johnson, empleó un robot de cuatro patas para desarrollar una táctica de movimiento basada en respuestas inmediatas. Otras máquinas, como por ejemplo aquellas que poseen ruedas, pueden quedar inmovilizadas por las enredaderas o causar daños al entorno natural.
«Cuando llevas robots al aire libre, todo el problema de interactuar con el entorno se vuelve exponencialmente más difícil porque tienes que ser más deliberado en todo lo que haces«, dijo David Ologan, estudiante de maestría en ingeniería mecánica.
Por su parte, Justin Yim, profesor de ingeniería en la Universidad de Illinois Urbana-Champaign y colaborador del proyecto dijo: «Los obstáculos del mundo real pueden ser rígidos como una roca o blandos como una enredadera y queremos que las máquinas tengan estrategias que eviten tropezar con cualquiera de los dos«.
Mejoras enfocadas en el movimiento
La investigación demuestra un observador basado en el impulso para la estimación del par propioceptivo de la articulación adecuado para clasificar los contactos en la extremidad de un robot como enredos. Es decir, monitorea la movilidad de sus patas para ver si alguna se queda atascada en algo y no avanza.
«Los robots con patas pueden seleccionar puntos de apoyo y pasar por encima de cosas en lugar de simplemente pasar por encima de todo«, dijo Ologan. «El problema con esto es que con cada paso tienes que razonar sobre tus puntos de apoyo. El sistema es increíblemente delicado. Si te topas con un escalón, toda la máquina puede caerse, por lo que necesitamos métodos para responder al contacto externo«.
Ologan explica que el entorno también afecta su eficiencia y el rendimiento. «Es interesante ver el potencial de los robots con patas en entornos al aire libre basados en la vegetación«, dijo.
La habilidad de los cuadrúpedos para moverse por la vegetación tiene una amplia gama de aplicaciones en diversos campos, mencionó Ologan. Actualmente, estos se emplean en la inspección de plataformas petroleras y mejorar sus capacidades puede resultar beneficioso incluso en operaciones de rescate.
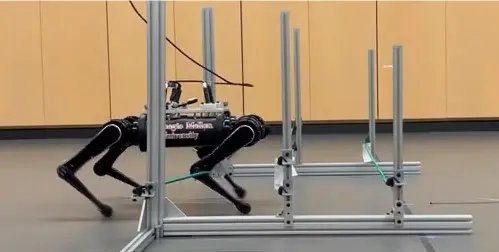
Así mismo, el equipo realizó pruebas con diversas variantes del patrón de caminata del robot Charlie y concluyeron que la opción más eficaz para permitirle navegar y liberarse de obstáculos era hacer que retrajera sus piernas de forma reactiva. En contraste, otros enfoques, como los pasos altos y las rodillas hacia adelante, no demostraron ser tan efectivos.
Mediante esta evaluación, el equipo pudo desarrollar un movimiento de reacción sencillo de la pierna que le permitía liberarse de cualquier enredo detectado. Esta tecnología para asistir a los robots en desenredarse también puede incorporarse en otras máquinas sin necesidad de modificar su hardware existente.
«Toda esta estrategia de reacción es sólo una parte de un proceso de varios pasos«, resaltó Ologan.
¡No te pierdas nuestras noticias diarias y forma parte de nuestra comunidad en las redes sociales!
Inspenet: https://inspenet.com/
YouTube: https://www.youtube.com/@inspenet
LinkedIn: https://www.linkedin.com/company/inspenetnetwork
Facebook: https://www.facebook.com/inspenetnetwork
Instagram: https://www.instagram.com/inspenet/
Fuente: https://techxplore.com/news/2023-10-tricky-tangles-robots-vine-like-vegetation.html