
Tabla de Contenidos
Inspenet, 6 de septiembre 2023.
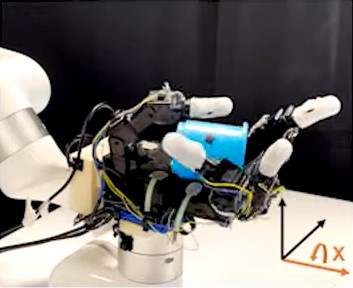
Un grupo de ingenieros de la Universidad de California en San Diego (EE. UU.) ha desarrollado una mano robótica capaz de girar objetos utilizando exclusivamente el sentido del tacto, sin depender de la visión. Los científicos detrás de este proyecto se inspiraron en la manera natural en que los seres humanos manipulan objetos sin necesidad de verlos, un concepto fácil de comprender, pero difícil de implementar en sistemas automatizados.
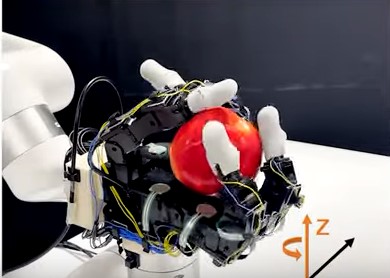
La extremidad robótica diseñada por estos científicos puede realizar giros suaves en una amplia variedad de objetos, desde pequeños juguetes hasta frutas, verduras y latas, sin causarles daño o aplastarlos. El único tipo de información que utiliza este dispositivo proviene del sentido del tacto. Así pues, los investigadores confían en que esta innovación podría permitir que estos robots operen en entornos sin luz.
Una mano robótica «nada costosa»
El equipo de ingenieros presentó su investigación durante la Conferencia de Robótica: Ciencia y Sistemas de 2023. Utilizaron un total de 16 sensores táctiles, ubicados en la palma y en cada uno de los cuatro dedos del robot. La función principal de la mayoría de estos sensores es detectar si se produce un contacto entre el robot y el objeto que se intenta manipular. Estos emplean señales binarias simples, lo que los hace una opción económica.
Este enfoque se complementa con otros métodos que utilizan menos sensores, pero de mayor resolución, lo que los hace más costosos. El Dr. Xiaolong Wang, profesor de ingeniería eléctrica e informática en San Diego, describe la solución alcanzada como «muy sencilla». “Hemos demostrado que no necesitamos detalles sobre la textura de algo para realizar esta tarea”.
La disposición de sensores táctiles permite al robot identificar la estructura tridimensional del objeto y su orientación, lo que le permite rotarlos sin depender de la visión. Para desarrollar este sistema, se realizó un análisis exhaustivo de las articulaciones de las manos humanas y el robot replica con precisión y atención estos detalles anatómicos.
Durante los experimentos, se requirió que el robot sujetara diversos objetos, como un tomate, un pimiento, un bote de mantequilla de cacahuete e incluso un pato de goma. Este último representó un desafío particularmente significativo, según lo reconocido por los participantes en las pruebas. El siguiente objetivo es lograr que la máquina pueda lanzar y atrapar objetos o realizar malabarismos con ellos.
Fuente: https://www.lavanguardia.com/tecnologia/20230905/9204815/mano-robotica-robot-con-tacto.amp.html