Inspenet, 13 de octubre 2023.
Científicos del Instituto Tecnológico de Massachusetts (MIT) han desarrollado recientemente una mano robótica altamente precisa que presenta la ventaja de ser más fácil de ampliar. Esto se debe a que sus piezas pueden ser fabricadas mediante técnicas comunes como la impresión 3D y el corte con láser.
La mano robótica, que se detalla en un artículo publicado en la conferencia IEEE International Conference on Soft Robotics (RoboSoft) de 2023, se basa en una estructura modular compuesta por varios bloques de construcción que se pueden reorganizar para realizar distintos movimientos.
El propósito principal del trabajo reciente llevado a cabo por el equipo consistió en desarrollar una extremidad robótica de naturaleza flexible que no dependiera de componentes altamente avanzados y costosos. No obstante, se buscaba que esta mano flexible tuviera la capacidad de llevar a cabo movimientos más complejos en comparación con las garras robóticas convencionales que están construidas exclusivamente con materiales rígidos. Esto, en última instancia, mejoraría las capacidades de los robots en términos de manipulación de objetos.
Mano robótica independiente
La mano robótica modular desarrollada por el equipo de investigación del MIT se puede ajustar de manera sencilla para adecuarse a diversas aplicaciones. Por ejemplo, los investigadores tienen la opción de agregar o eliminar dedos, así como de reorganizar sus elementos de distintas maneras para lograr una variedad de tipos de agarre o mejorar su desempeño en situaciones particulares.
Sorprendentemente, tanto los elementos rígidos como los flexibles empleados en la creación de la nueva mano robótica son de fabricación sencilla. Los «huesos» que constituyen el armazón de la mano se pueden producir mediante impresión 3D y los imanes, sensores y cables que contienen están disponibles comercialmente.
Para confeccionar la capa exterior que envuelve los huesos, el equipo siguió un proceso de moldeado de dos etapas. Inicialmente, crearon piezas de molde distintas mediante impresión 3D y posteriormente, emplearon esas piezas para dar forma a la silicona que recubre los dedos.

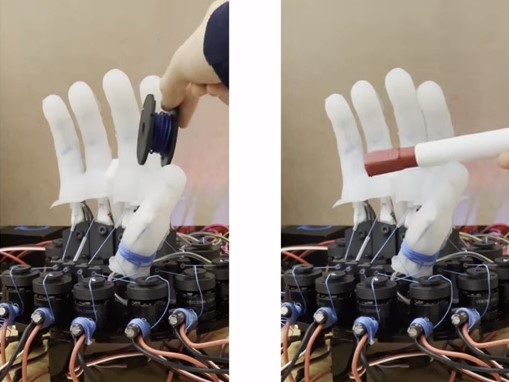
Dentro de su investigación, los investigadores fabricaron un prototipo de una mano robótica con cinco dedos y evaluaron su funcionamiento. Concluyeron que la extremidad podía ejecutar con éxito diversos tipos de agarre, emulando la manera en que las manos humanas agarran y sujetan distintos objetos. Esta mano robótica demostró una firmeza adecuada al asir una variedad de objetos, tanto rígidos como flexibles, de diversos tamaños, como un vaso de plástico, un bolígrafo y un anillo de plástico redondo.
Se plantea que la mano robótica se desarrolle más y se someta a pruebas adicionales para perfeccionar y validar sus habilidades. A medida que evolucione, podría ser integrada con otras extremidades robóticas con el propósito de crear robots humanoides adaptables que sean especialmente hábiles en la manipulación de objetos.
¡Síguenos en nuestras redes sociales y mantente al día con nuestras noticias!
Inspenet: https://inspenet.com/
YouTube: https://www.youtube.com/@inspenet
LinkedIn: https://www.linkedin.com/company/inspenetnetwork
Facebook: https://www.facebook.com/inspenetnetwork
Instagram: https://www.instagram.com/inspenet/
Fuente: https://techxplore.com/news/2023-10-human-inspired-robotic-based-modular.html