
Inspenet, 31 mayo 2023
Investigadores de la Universidad de Columbia han creado la primera mano robótica hipersensible que es capaz de sentir lo que toca, lo cual supone un avance sin precedentes para lo que podría ser la suplantación de extremidades a nivel sensorial.
Por primera vez una máquina puede sentir y manejar objetos, incluso en la más absoluta oscuridad, simplemente con el tacto, usando Inteligencia Artificial (IA).
Conoce la primera mano robótica hipersensible entrenada con IA
Gracias a una IA personalizada, lograron entrenar al robot para sujetar o simplemente tocar algo, aunque no lo vea. Usando el aprendizaje por refuerzo, se puede entrenar, en este caso a una mano robótica hipersensible, para que detecte materiales en cualquier espacio.
Cuando se programa la IA y el robot completa el movimiento, o la orden simplemente, que se le asigna, el software es recompensado con un acierto, cuando falla, es castigado con un error. El problema de esto es que cuando el robot entiende que ha fallado debe entender que no puede dejar la acción.
Por ejemplo, si sostiene una pelota, y no cumple con el movimiento siguiente que se le pide y se le marca dicha acción fallida como error, él debe entender que debe seguir en el punto anterior y aprender del error. Por este tipo de situaciones se necesita una IA cada vez más sofisticada, el problema es que no están todavía al nivel de complejidad que, incluso un bebé, podría llegar a entender.
También, usaron un tipo de algoritmo de aprendizaje automático, que se fundamenta en la planificación basada en el muestreo, así el robot puede explorar aleatoriamente diferentes trayectorias en su espacio de estados.
Explora el fascinante entrenamiento de una mano robótica que puede sentir y manipular objetos sin necesidad de verlos
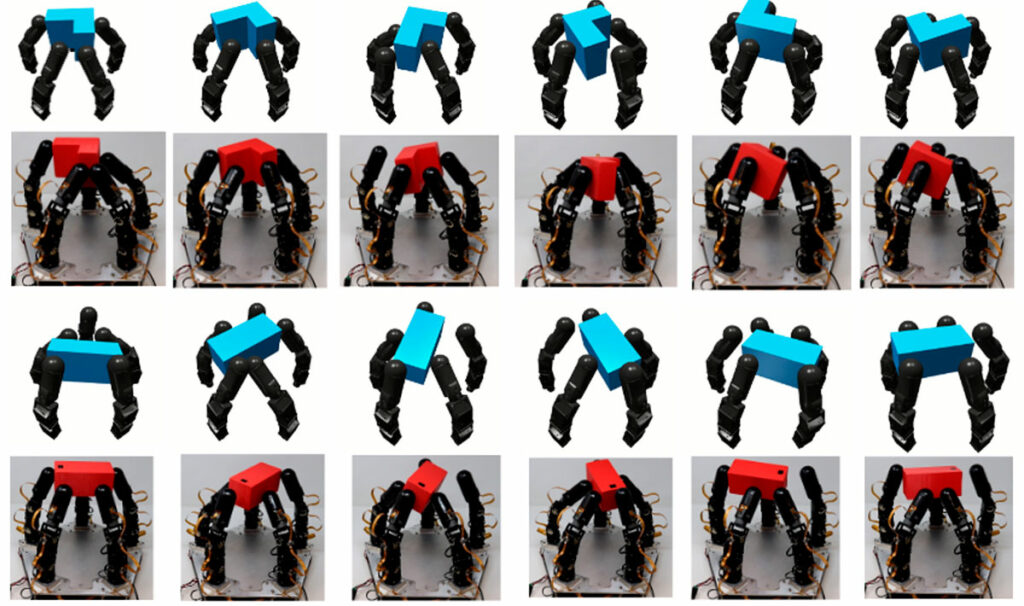
El entrenamiento es tan intenso, que las cámaras que se integran para ayudar a entender a la IA dónde está el objeto y cómo tiene que sostenerlo son insuficientes, puesto que el robot ha llegado a comprender el concepto de no tener luz y tener que palpar.
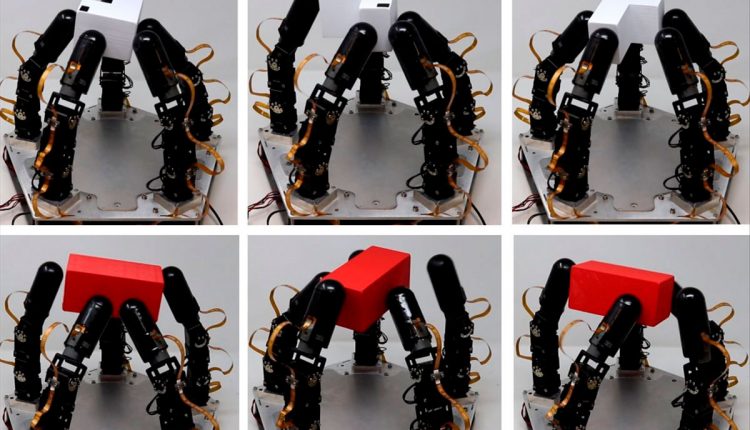
Por ello, se dotó a los dedos de una serie de sensores para que pudiesen sentir lo que tocan, detectan incluso el movimiento del objeto, como una pelota que se mueve al tocarla, así como su posible ubicación cuando esta se desplaza.
En el caso de la pelota, se ha llegado a conseguir que esta mano robótica hipersensible pueda balancear la presión de cada dedo mediante el entrenamiento de la IA, e incluso, se ha llegado a conseguir que la sujete con solo tres dedos sin que haya un desequilibrio de fuerza en cada uno de ellos.
Para que la mano robótica pudiera sentir lo que toca y detectar el movimiento y la ubicación del objeto, también se utilizó otro algoritmo llamado árbol de búsqueda aleatorio rápido.
Esto abre un campo totalmente nuevo, ya que se podrían diseñar articulaciones y partes del cuerpo con un grado de sensibilidad muy alto, que ayude a las personas con discapacidad y problemas físicos, con las tareas que actualmente no pueden hacer.
Fuente: Chapuzas Informático
Fotos: ARVIX
No te pierdas el noticiero Inspenet News en: https://inspenet.com/inspenet-tv/