Un equipo de La Universidad Técnica de Múnich (TUM) ha dado un salto significativo en la lucha contra la contaminación marina con el desarrollo de un robot submarino autónomo diseñado para identificar y recoger residuos del fondo marino de forma eficiente.
El robot submarino forma parte de un sistema interconectado que incluye una embarcación de apoyo, un bote auxiliar autónomo, un dron aéreo y un pequeño robot de exploración subacuática. El conjunto opera de forma sincronizada, mapeando el fondo marino mediante ultrasonidos y cámaras, para luego guiar al robot principal hacia los puntos críticos de acumulación de basura.

¿Cómo funciona el robot submarino?
El robot de buceo de TUM, propulsada por ocho miniturbinas, es capaz de maniobrar con exactitud gracias a su diseño neutro en flotabilidad, lo que le permite operar con precisión incluso en aguas con visibilidad limitada. Mediante una combinación de sonar y cámaras, el sistema genera modelos 3D de los objetos sumergidos, lo que facilita su identificación y recuperación segura.
Cabe destacar que la falta de bases de datos visuales para entrenar sistemas de visión por IA ha sido un reto, por ello, los socios del proyecto han etiquetado más de 7000 imágenes para entrenar la red neuronal encargada de distinguir entre residuos y el entorno natural marino.
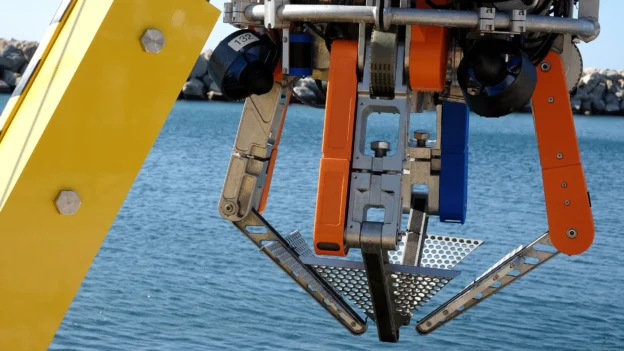
El robot cuenta con una pinza robotica de cuatro dedos, capaz de ejercer hasta 4000 newtons de fuerza, permitiéndole levantar objetos de hasta 250 kg. Al mismo tiempo, cuenta con sensores que calibran la presión en tiempo real, para evitar dañar materiales frágiles como botellas de vidrio o cubos plásticos.
Conectividad por cable para energía y control
Aunque el sistema está diseñado para funcionar de forma autónoma, el robot se mantiene conectado mediante un cable al barco de apoyo para garantizar un suministro energético constante y permitir un mejor procesamiento de los datos, especialmente en tareas que requieren mayor precisión computacional. Además, el cable actúa como medio de extracción para objetos pesados hacia la superficie.
Se puede apreciar como la garra robotica es capaz de levantar el asiento de un vehículo durante su prueba en el puerto de Marsella. Fuente: MIRMI – Robotics and Machine Intelligence.
Primeras pruebas con éxito en el puerto de Marsella
El sistema fue puesto a prueba en el puerto de Marsella, donde demostró fue capaz de recuperar elementos voluminosos como bicicletas, neumáticos y redes de pesca. En ubicaciones como Dubrovnik, los equipos registraron más de mil piezas de basura en áreas relativamente pequeñas, subrayando la urgencia de soluciones tecnológicas a gran escala.
Además, según el análisis de la TUM, el sistema es económico a profundidades superiores a 16 metros, donde el buceo humano se vuelve una tarea peligrosa y cara. Este robot submarino autónomo forma parte del proyecto europeo SEACLEAR, una iniciativa financiada por la Unión Europea para automatizar la limpieza submarina de los ecosistemas marinos y es otra prueba de que la tecnología autónoma es una solución viable y prometedora para la limpieza de los océanos.
Fuente y Fotos: Universidad Técnica de Múnich